004.车载LiDAR点云道路两侧地物自动分割
车载LiDAR点云中含有行人、车辆、路灯、行道树等,使用CSF和聚类工具自动将地物分隔
步骤
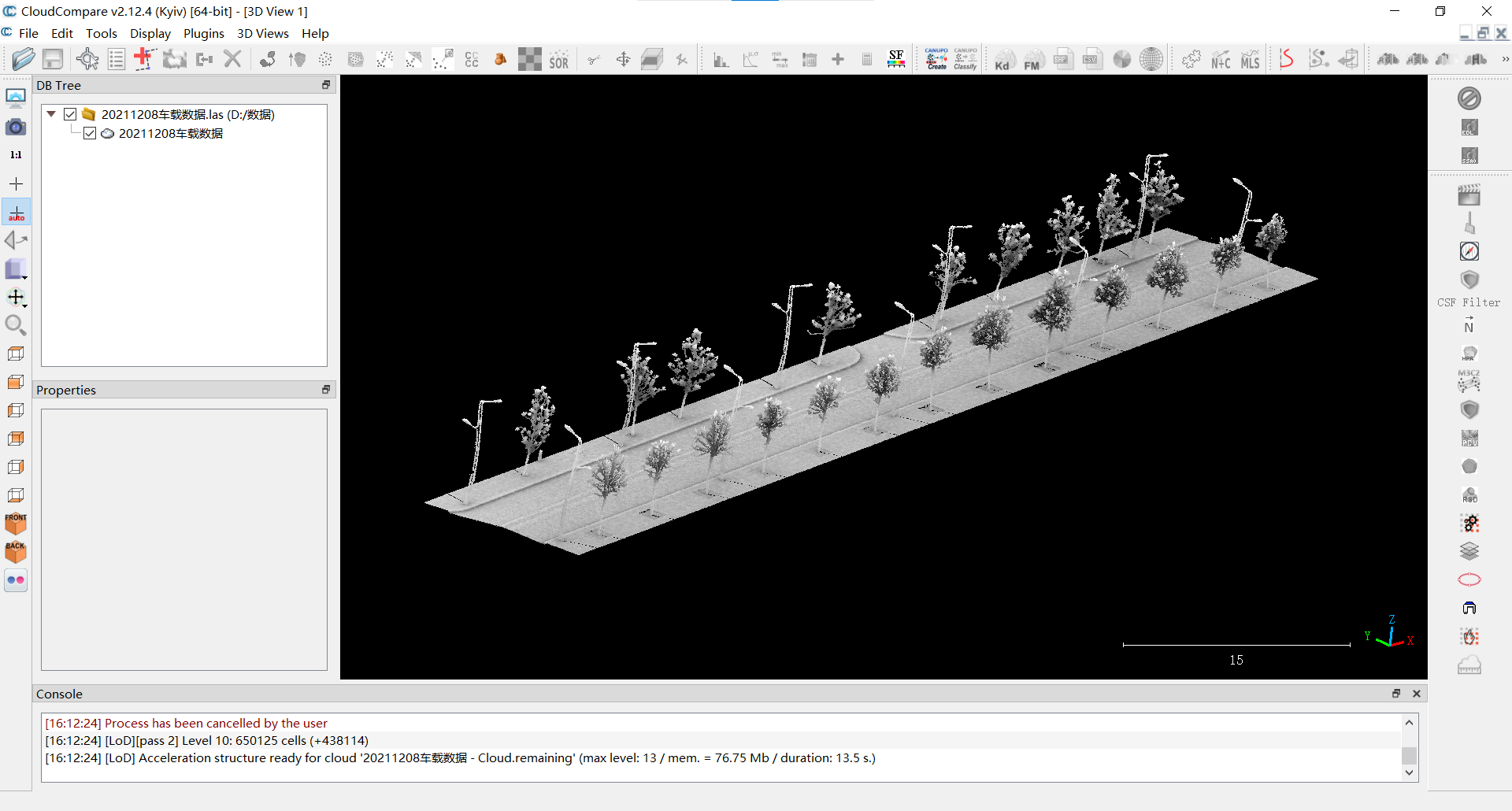
- 打开点云数据(已去除噪声点)
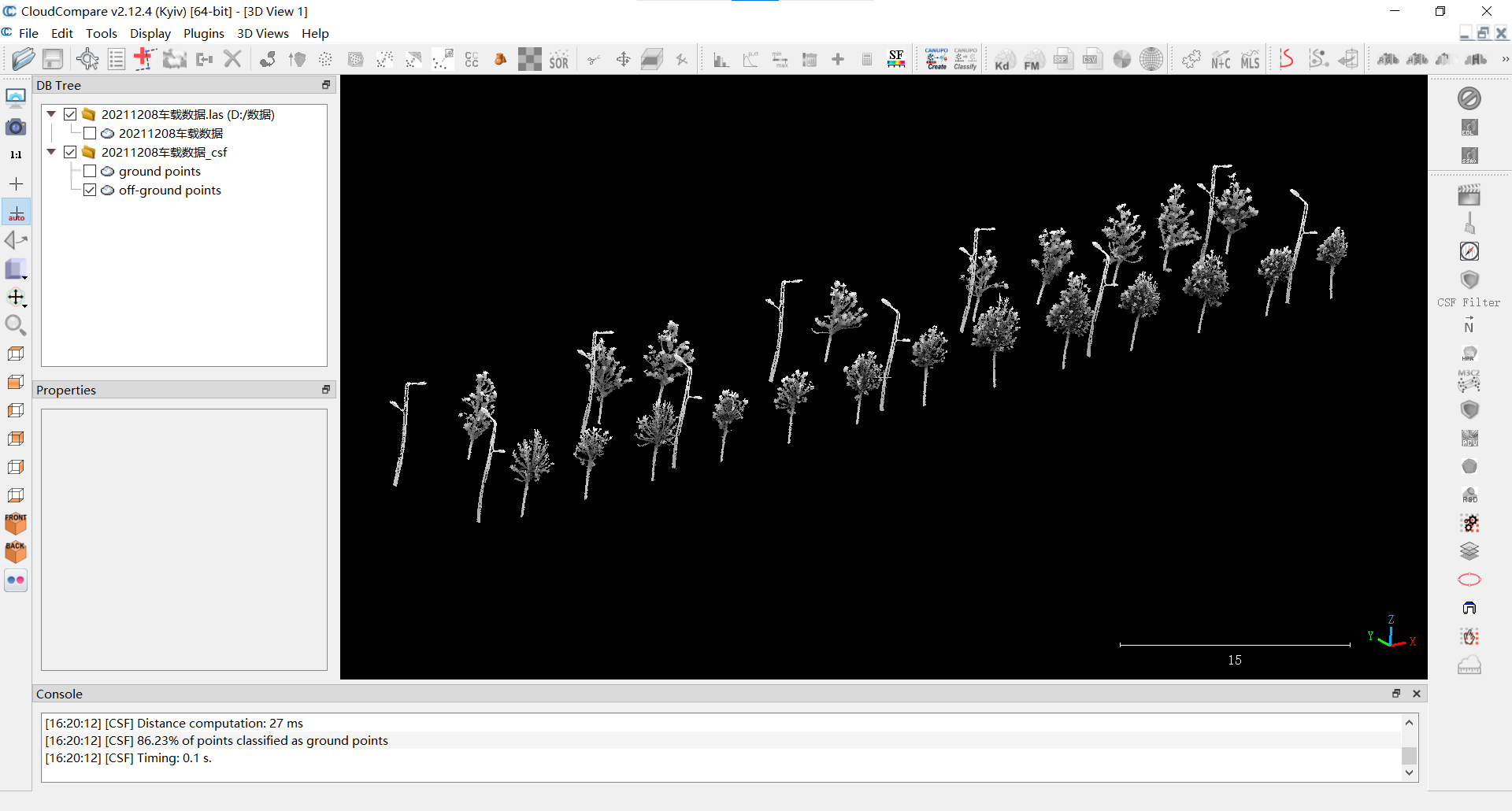
进行CSF滤波,点击工具栏中“CSF Filter”(或菜单栏中“Plugins/CSF Filter”)工具,主要进行以下参数设置
- Scense:Steep slope/Relief/Flat
分别代表陡坡、缓坡、平地,根据点云特点选择合适的类型 - Cloth resolution
用于覆盖地形的布料的网格大小,设置的布料分辨率越大,获得的DEM越粗糙 - Max iterations
地形模拟的最大迭代次数 - Classification threshold
根据点与模拟地形的距离将点云分为地面和非地面部分的阈值
- Scense:Steep slope/Relief/Flat
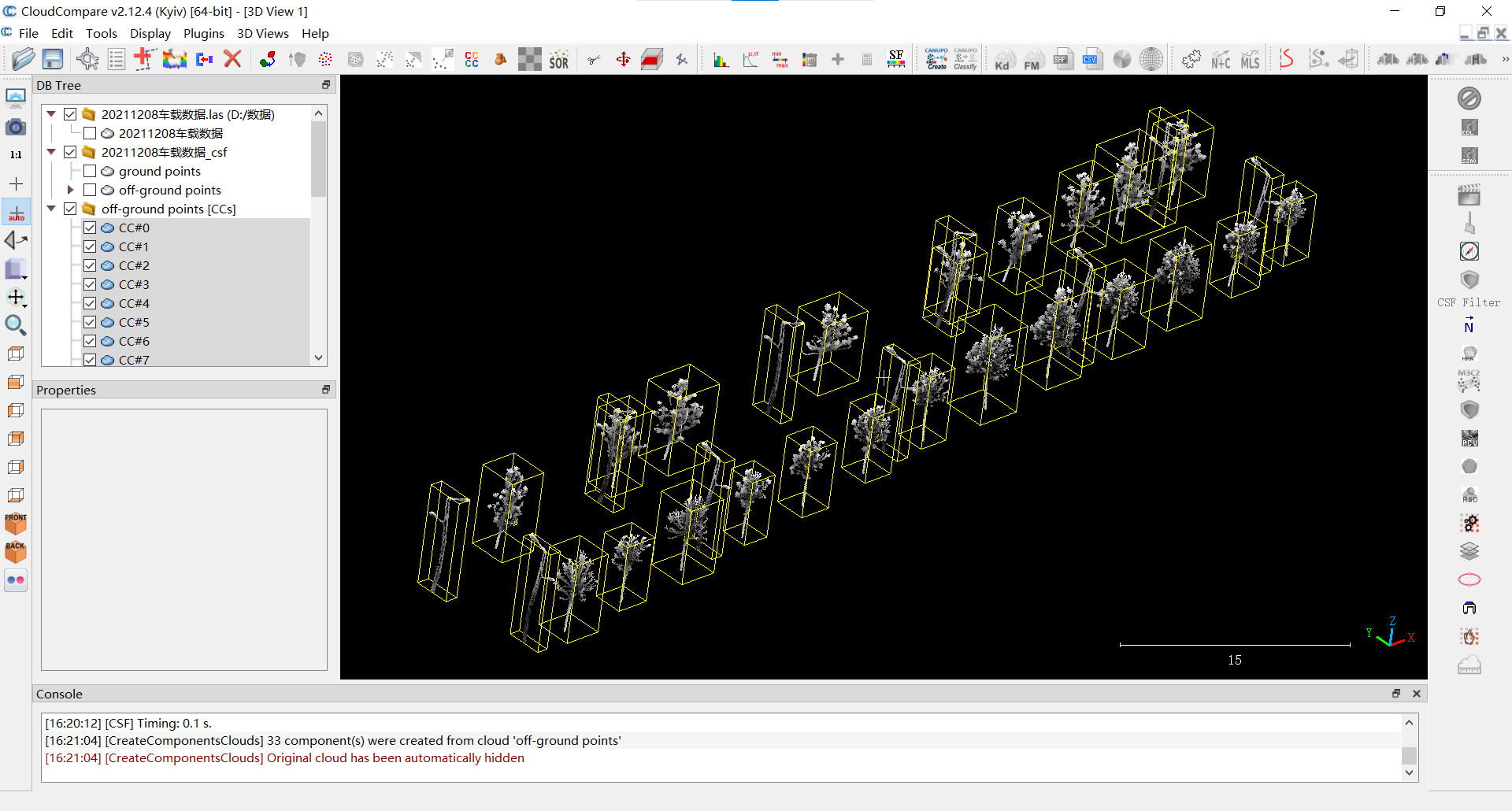
对互不联通的物体进行聚类,点击菜单栏中“Label connected components”(或菜单栏中“Tools/Segmentation/Label connected Comp.”)工具,主要进行以下参数设置
Octree Leval
八叉树索引级别Min. points per componert
每一个类别中的点数量的最小值